
Radiogoniometría Adcock/Watson-Watt
"Desde hace algún tiempo se ha reconocido que el operador de una estación D/F debe ser considerado un especialista y la experiencia ha demostrado la necesidad de que aquéllos que desempeñen estas tareas tengan un entrenamiento especializado."
W.E. Crook. D/F Handbook for wireless operators. 1942.
|
Principal → Artículos Técnicos → Radiogoniometría Adcock/Watson-Watt |
![]() This article is also available in English (este artículo también está disponible en inglés).
This article is also available in English (este artículo también está disponible en inglés).
![]() Resumen:
Resumen:
En este artículo se ofrece una descripción técnica del funcionamiento de los sistemas de radiogoniometría del tipo Adcock/Watson-Watt, basados en el empleo de cuatro monopolos con un sensor adicional para evitar ambigüedades y utilizados habitualmente en ámbitos militares (SIGINT), de radionavegación y de radiolocalización en emergencias, en las bandas de MF, HF, VHF y UHF. El desarrollo teórico se apoya en simulaciones de los diagramas de radiación realizadas con 4Nec2 y de las señales demoduladas con un software de representación gráfica de funciones.
Índice.
1. El array Adcock y el sistema Watson-Watt.
2. Determinación del ángulo de llegada.
3. Implementación del método.
4. Resolución de ambigüedades.
5. Referencias y bibliografía.
1. El array Adcock y el sistema Watson-Watt.
Durante la Segunda Guerra Mundial, una de las principales técnicas de radiogoniometría empleadas por las estaciones "Y" de inteligencia de señales1 (SIGINT) se basó en el empleo de arrays de 4 monopolos o dipolos dispuestos de forma ortogonal2. Haciendo rotar las antenas y combinando adecuadamente las señales recibidas por las mismas, se conforma un diagrama de radiación bidireccional que permite determinar la dirección de llegada de una señal radio de interés, especialmente a través de los dos nulos del diagrama de radiación3. Esta técnica fue patentada por el teniente ingeniero inglés Frank Adcock, del No.3 Army Wireless Observation Group, en el año 19194. Se trata, por tanto, de un método comparativo de amplitud para la determinación de la dirección de llegada (DF, Direction Finding)5.
En un array Adcock, las cuatro antenas se agrupan de dos en dos, disponiéndose cada pareja siguiendo un eje de referencia. Supongamos, por ejemplo, que una de las parejas está dispuesta siguiendo el eje Norte-Sur (eje de ordenadas, Y) y la otra siguiendo el eje Este-Oeste (eje de abscisas, X), tal y como se muestra en la fig.1.
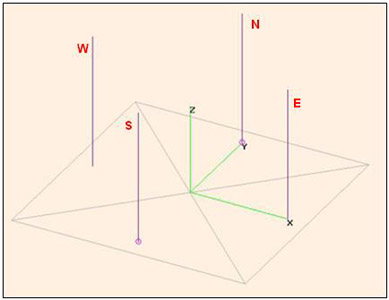
Fig.1. Array Adcock de cuatro monopolos simulado en 4Nec2
En 1925-26, el inglés Robert Watson-Watt (uno de los pioneros de la implementación del radar como sistema de alerta temprana en la WWII) introdujo dos mejoras importantes al sistema propuesto por Adcock: la utilización de una quinta antena para evitar ambigüedades y el empleo de un osciloscopio de rayos catódicos para la representación visual del ángulo de llegada3, permitiendo que no fuera necesario rotar el array para determinarlo.
La precisión de un sistema de radiogoniometría Adcock/Watson-Watt en el cálculo de direcciones de llegada está en torno a los 2-3 grados6. Por otro lado, el sistema no es apto en radiogoniometría de alta frecuencia (HF/DF, High Frequency Direction Finding) para señales NVIS, dado que los diagramas de radiación de los monopolos o dipolos empleados no presentan casi ganancia en ángulos de despegue excesivamente elevados7.
Para explicar la técnica de radiogoniometría Adcock/Watson-Watt, a continuación se realizará un desarrollo teórico del algoritmo en el que se basa el sistema, apoyado en varias simulaciones realizadas con el programa 4Nec2.
En los ejemplos, el objetivo se centrará en la determinación de la dirección de llegada (DOA, Direction of Arrival) de una señal de radio de interés que puede estar comprendida entre 2 MHz y 10 MHz (MF-HF). Se mostrará un ejemplo concreto para una señal de 5 MHz.
Para simular el array Adcock con el programa 4Nec2, consideraremos monopolos de 1/4 de longitud de onda para una frecuencia de trabajo de 5 MHz. Es decir, cada monopolo tendrá una longitud de 15 metros. Para simplificar el análisis, obviaremos la parte relativa al acoplamiento de las antenas en toda la banda de trabajo, aunque realmente no es necesario que las antenas sean resonantes en la frecuencia de trabajo de la señal de interés8.
La separación de las antenas o línea de base es otro punto importante y deberá ser como máximo igual a la mitad de la longitud de onda de la máxima frecuencia de trabajo9,10, idealmente en torno a 1/8 ó 1/10 de la longitud de onda5,7. Si la separación fuese mayor a la mitad de la longitud de onda, se producirían ambigüedades en las mediciones. Por este motivo, si el ancho de banda a vigilar es muy amplio, puede ser preciso disponer de líneas de base distintas para cada rango.
En nuestro ejemplo, dicho límite viene dado por 10 MHz, con una longitud de onda de 30 metros, por lo que inicialmente dispondremos las antenas de cada pareja con una separación de 15 metros.
Se utilizará un modelo de tierra perfecta, de forma que no resulte necesario configurar una red de radiales para conformar el plano de tierra de cada monopolo, de acuerdo a las reglas de diseño del algoritmo NEC-2.
A continuación se muestra el contenido del fichero de simulación. Nótese que en la simulación de 4Nec2 solamente se analizará una de las parejas de monopolos, concretamente la N-S.
| CM Array Adcock de 4 monopolos optimizado para 5 MHz CM by EA4FSI CM CE SY monlen=15 'Longitud del monopolo SY monsep=15 'Separación entre parejas de monopolos GW 1 128 0 monsep/2 0.001 0 monsep/2 monlen 2mm 'Monopolo N GW 2 128 0 -monsep/2 0.001 0 -monsep/2 monlen 2mm 'Monopolo S GW 3 128 -monsep/2 0 0.001 -monsep/2 0 monlen 2mm 'Monopolo W GW 4 128 monsep/2 0 0.001 monsep/2 0 monlen 2mm 'Monopolo E GE 1 GN 1 EK EX 0 1 1 0 1 0 0 'Generador monopolo N EX 0 2 1 0 -1 1.22e-16 0 'Generador monopolo S FR 0 0 0 0 5 0 EN |
2. Determinación del ángulo de llegada.
Una vez dispuesto el array con cada pareja de antenas siguiendo los ejes N-S y E-W, supongamos que comenzamos a recibir una señal de interés (SOI, Signal of Interest) en forma de transmisión de radio cuyo frente de ondas incide en el array con una dirección de llegada (DOA, Direction of Arrival) desconocida, que necesitamos determinar.
Denominaremos "fi" al ángulo formado por la dirección de propagación del frente de ondas de la señal de interés y el eje E-W (eje X en nuestro sistema de referencia). Es decir, "fi" será la DOA que necesitamos determinar.
El frente de ondas llegará en distintos instantes a cada una de las antenas del array, ya que la distancia recorrida será distinta, tal y como se muestra en la fig.2. Esto implica que cada antena recibirá la señal de interés con un determinado desfase.
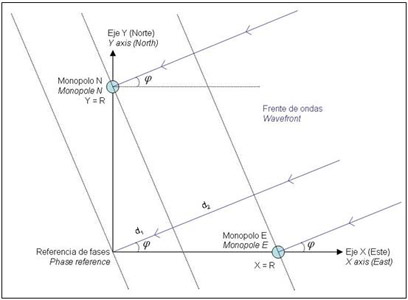
Fig.2. Llegada del frente de ondas al array Adcock
Para facilitar los cálculos, tomaremos la referencia de fases en el origen de coordenadas y nos fijaremos solamente en el primer cuadrante (monopolos N y E). Cada monopolo se ubica a una distancia R del origen de coordenadas.
De acuerdo al esquema mostrado en la fig.2, el frente de ondas que incide en el monopolo N recorre una distancia d1 inferior a la del punto de referencia de fases, mientras que el frente de ondas que incide en el monopolo E recorre una distancia d1+d2 inferior. Conocidas estas distancias, podremos determinar el desfase del frente de ondas en ambos monopolos.
Realizando cálculos trigonométricos, determinamos la distancia d1+d2 [1]:
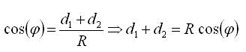 |
[1] |
De un modo similar, determinamos la distancia d1 [2]:
[2] |
Dado que nuestro array es simétrico y siguiendo con la referencia de fases en el origen de coordenadas, en el monopolo S tendremos el mismo desfase que en el monopolo N, pero con valor negativo. Del mismo modo, en el monopolo W tendremos el mismo desfase que en el monopolo E, con valor negativo.
En cada uno de los monopolos, por tanto, el frente de ondas inducirá las siguientes tensiones [3]:
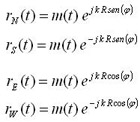 |
[3] |
Siendo m(t) la onda modulada de interés que se recibe en el array y K el número de onda para la frecuencia de trabajo [4]:
[4] |
Esta onda tendrá una polarización lineal que probablemente no sea ni vertical ni horizontal respecto al plano de tierra, debido a los efectos de la propagación ionosférica. Dado que los monopolos de nuestro array están dispuestos de forma perpendicular (vertical) al plano de tierra, se considera solamente la componente vertical de la onda recibida. La componente horizontal, cuya energía podría provocar errores en la determinación del ángulo de llegada3,6,8, queda eliminada de esta forma.
Llegados a este punto, la técnica descrita por Adcock para determinar el DOA consiste en restar las señales recibidas por los monopolos de cada pareja. Consideremos en primer lugar la resta de las señales de los monopolos N y S [5]:
[5] |
Si ahora utilizamos la siguiente identidad [6]:
[6] |
El desarrollo de la resta [5] queda de la siguiente forma [7]:
[7] |
Por otro lado, podemos considerar que el número de onda K tendrá un valor muy pequeño para las frecuencias de nuestra banda de trabajo, por lo que finalmente podemos hacer la siguiente aproximación [8]:
[8] |
Si ahora consideramos la resta de las señales de los monopolos E y W [9]:
[9] |
Utilizando nuevamente la identidad [6], resulta [10]:
[10] |
Del mismo modo, teniendo en cuenta el valor pequeño del número de onda K, hacemos la aproximación [11]:
[11] |
Para determinar el DOA, bastará con calcular el arcotangente del cociente de ambas diferencias [8, 11], de la siguiente forma [12]:
 |
[12] |
3. Implementación del método.
En las primeras implementaciones del método descrito anteriormente, se emplearon monitores de tubo de rayos catódicos (CRT) del tipo osciloscopio3,8. En este tipo de CRT, la representación de señales en pantalla se controla horizontalmente mediante la aplicación de un campo eléctrico en unas placas situadas a la derecha y a la izquierda del dispositivo y verticalmente mediante otro par de placas ubicadas arriba y abajo.
Previamente demoduladas a través de receptores o de un sólo receptor multicanal, las señales procedentes de los monopolos Norte y Sur se aplican a las placas verticales y las procedentes de los monopolos Este y Oeste a las placas horizontales, como se muestra en la fig.3.
.
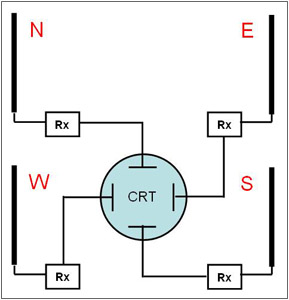
Fig.3. Implementación del método con un CRT
De esta forma, al detectarse una señal de radio de interés que llega al array con una dirección de llegada "fi", en el CRT se representaría la recta mostrada en la fig.4. Si los canales N-S y E-W no están bien equilibrados, se producirán errores en la determinación del DOA, pudiendo incluso representarse una elipse en lugar de una recta en el CRT. Es importante que los osciladores locales de los distintos canales estén sincronizados o que, idealmente, se use un único oscilador local común8.

Fig.4. Representación de la DOA en un CRT
Conocida la ubicación geográfica de varios arrays Adcock, la posición exacta del transmisor de interés podría de esta forma determinarse de forma colaborativa entre varias estaciones, mediante triangulación.
4. Resolución de ambigüedades.
El diagrama de radiación resultante de restar las tensiones inducidas en dos monopolos tiene forma de ocho3,5,6,8,11, tal y como se muestra en la fig.5, obtenida mediante simulación con 4Nec2.
Como ya se ha indicado, para realizar la simulación del diagrama en 4Nec2, se ha considerado una fuente conectada al monopolo N y otra fuente conectada al monopolo S, desfasada 180 grados respecto a la primera. De esta forma, se consigue simular la resta de ambas señales.
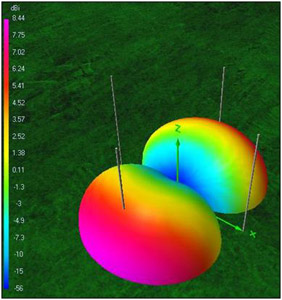
Fig.5. Diagrama de radiación de una pareja de monopolos Adcock
El problema que se presenta, siguiendo el mismo ejemplo anterior, es que una señal que llegue al array con el mismo ángulo pero desde el tercer cuadrante (desde el SW) en lugar que desde el primero (desde el NE), generaría exactamente la misma recta en el CRT. La misma ambigüedad existiría entre señales que lleguen con el mismo ángulo a través de los cuadrantes segundo y cuarto.
Existen varios métodos para solucionar el problema de la ambigüedad. Uno de los más comunes es añadir una cuarta antena, que denominaremos monopolo sensor, justo en el centro del array Adcock11. La señal de esta antena adicional se puede utilizar para modular el canal de intensidad del CRT, haciendo que se represente solamente la mitad de la recta correspondiente al cuadrante por el que llega la señal. La disposición del array sería la mostrada en la fig.6.
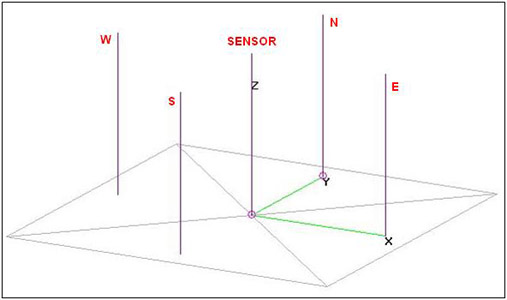
Fig.6. Array Adcock de cuatro elementos con monopolo sensor
El nuevo monopolo sensor se ubica precisamente en la referencia de fases que hemos utilizado en nuestro análisis (fig.2). Para explicar el funcionamiento del conjunto, consideremos como ejemplo las dos siguientes señales de interés que llegan al array:
1) Señal sinusoidal de 5 MHz que llega por el cuadrante NE con DOA = 60º (Azimut = 30º).
2) Señal sinusoidal de 5 MHz que llega por el cuadrante SW con DOA = 240º (Azimut = 210º).
Siendo en ambos casos la longitud de onda igual a 60 m y el número de onda [13]:
 |
[13] |
Estas dos señales generarían exactamente la misma recta en el CRT con el sistema de cuatro monopolos, es decir, estaríamos en un caso de ambigüedad.
Veamos qué sucede al añadir el monopolo sensor.
De acuerdo a [2], calculamos la distancia d1 [14]. Recordemos que los monopolos del ejemplo tienen una separación de 15 m entre sí, luego R = 7,5 m:
[14] |
Conocida esta distancia, el desfase en el monopolo N es [15]:
[15] |
Del mismo modo y de acuerdo a [1], el desfase en el monopolo S será de -0,679631 rad.
Consideremos ahora la señal resta de los monopolos N-S, descrita en [5]. Si el frente de onda está llegando por el cuadrante 1 (NE), tras los procesos de demodulación tendremos unas señales como las mostradas en la fig.7.
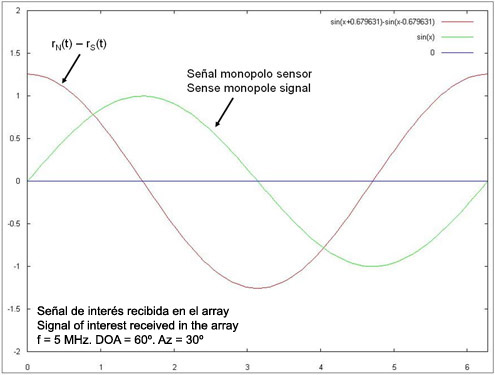
Fig.7. Diferencia de señales N-S y señal en el monopolo sensor (DOA=60º)
Si además desfasamos 90 grados la señal recibida por el monopolo sensor, tendremos las señales mostradas en la fig.8. Obsérvese que, con esta modificación, los pasos de ambas señales por el nivel de tensión nulo se producen de forma simultánea.
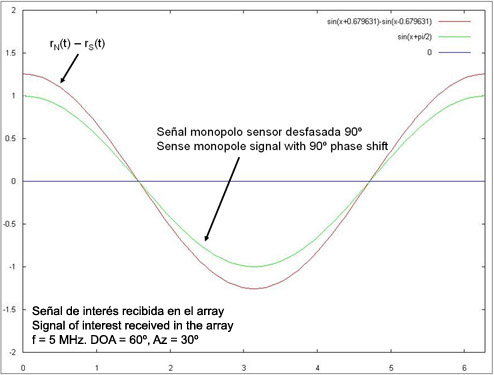
Fig.8. Diferencia de señales N-S y señal en el monopolo sensor desfasada 90º (DOA=60º)
Consideramos ahora la otra señal que llega en la misma dirección pero sentido opuesto, a través del cuadrante 3 (SW). Al utilizar el monopolo sensor con su señal desfasada 90º, tendremos las señales mostradas en la fig.9.
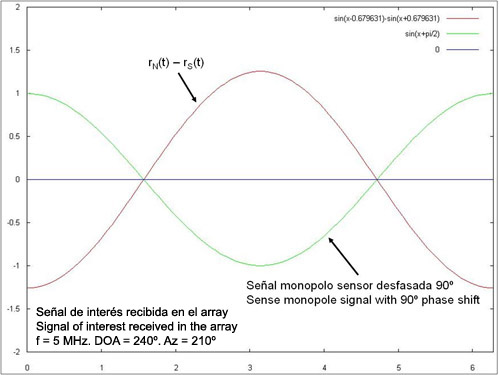
Fig.9. Diferencia de señales N-S y señal en el monopolo sensor desfasada 90º (DOA=240º)
Los resultados serían similares si comparamos señales que lleguen con los mismos ángulos pero a través de los cuadrantes NW y SE.
Analizando ambos resultados (figs. 8 y 9), observamos que podemos utilizar la señal del monopolo sensor para controlar la representación de la recta en el CRT. Si utilizamos los semiciclos positivos (tensión positiva) para habilitar la representación en el CRT y los semiciclos negativos (tensión negativa) para inhabilitarla, se darán los dos siguientes casos:
-
Si la señal llega por el cuadrante NE o por el cuadrante NW, la tensión aplicada al eje Y del CRT será siempre positiva y por lo tanto solamente se representará la parte de la recta correspondiente a Y > 0.
-
Si la señal llega por el cuadrante SE o por el cuadrante SW, la tensión aplicada al eje Y del CRT será siempre negativa y por lo tanto solamente se representará la parte de la recta correspondiente a Y < 0.
De esta forma, queda completamente resuelta la ambigüedad y se determina un único ángulo de llegada.
El sistema completo tendría el diagrama de bloques funcional que se muestra en la fig.10.
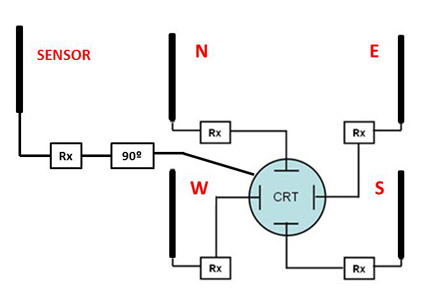
Fig.10. Diagrama de bloques de un radiogoniómetro Adcock/Watson-Watt con sensor
En la actualidad, los sistemas se implementan con tecnología digital. La señal procedente de los receptores se convierte a digital y se procesa en los dominios del tiempo y de la frecuencia para calcular el retardo de fase que permite determinar el ángulo de llegada. Además, mediante el empleo de conmutadores automáticos de antena, el número de receptores necesario puede reducirse
5. Referencias y bibliografía.
-
PIDGEON G. "Bletchley Park - Admiral Sinclair's War Station".The Secret Wireless War. The Story of MI6 Communications 1939-1945. Arundel Books, 2008. p.48-54.
-
GETHING P.J.D. "Review of DF Techniques". Radio Direction Finding and Superresolution. IEE Electromagnetic Waves Series 33. 2nd Edition. Peter Peregrinus Ltd., 1991. p.7-9.
-
JOHNSON R. et al. “Direction Finding Antennas and Systems”. Antenna Engineering Handbook. 3rd Edition. McGraw-Hill, 1993. Chapter 39.
-
GB patent 130490, Frank Adcock, "Improvements in Means for Determining the Direction of a Distant Source of Electro-magnetic Radiation", granted 1919-08-07. Enlace.
-
VOLAKIS J. et al. “Direction Finding Antennas and Systems”. Antenna Engineering Handbook. 4th Edition. McGraw-Hill, 2007. Chapter 47.
-
LAPORT E.A. Radio Antenna Engineering. McGraw-Hill, 1952. p.60-67, 214-215.
-
REMBOVSKY A. et al. "Direction Finding of Radio Emission Sources". Radio Monitoring. Problems, Methods and Equipment. Springer, 2009. p.237-316.
-
CARR J.J. “Antennas for Radio Direction Finding (RDF)”. Practical Antenna Handbook. 4th Edition. McGraw-Hill, 2001. p.439-456.
-
US Army Intelligence Center. Introduction to Radio Direction Finding. Subcourse Number IT0302. Edition C. 1999.
-
KEAVENY J.J. "Analysis and Implementation of a Novel Single Channel Direction Finding Algorithm on a Software Radio Platform". Virginia Polytechnic Institute and State University, 2005. Enlace.
-
TETLEY L., CALCUTT D. "Radio Direction Finding". Electronic Navigation Systems. 3rd Edition. Butterworth-Heinemann, 2001. p.346-368.
|
Ismael Pellejero - EA4FSI |